|
Prof.
SHEN's Group
Distributed
Artificial Intelligence Laboratory, ERC-FCDE, MoE
School of Mathematics, Renmin
University of China
|
Home | Research
| Honors
|
Teaching
|
Publications
| Members
| Future Students
| ILC DataBase

About us: Distributed Artificial Intelligence Lab
(DAI-Lab)
Latest
News
[20240320] Congratulations! Our paper Practical learning-tracking framework under unknown nonrepetitive channel randomness won The 17th Beijing Youth Outstanding Scientific and Technological Paper Award.
[20240307]
The manuscript "Iterative Learning based Convergence Analysis for
Nonlinear Impulsive Differential Inclusion Systems with Randomly
Varying Trial Lengths" has been accepted for publication in International Journal of Adaptive Control and Signal Processing. This work was led by Prof. Wang.
[20240224]
The manuscript "Data-Driven Distributed Learning Control for High-Speed
Trains Considering Quantization Effects and Measurement Bias" has been
accepted for publication in IEEE Transactions on Vehicular Technology. This work was led by Prof. Deqing Huang.
[20240222]
The manuscript "A Multistage Update Rule Framework for Iterative
Learning Control Systems" has been accepted for publication in IEEE Transactions on Automation Science and Engineering. This work was collaborated with Prof. Yu.
[20240131]
The manuscript "Iterative Learning Control for Differential Inclusion
Systems with Random Fading Channels by Varying Average Technique" has
been accepted for publication in Chaos. This work was led by Prof. Wang.
[20240103] The DAI Lab Annual Report for 2023 has been released.
[20240101] We, DAI Lab,
wish you Happy 2024.

Recent Research
Highlight: Learning Control with
Fading Channels
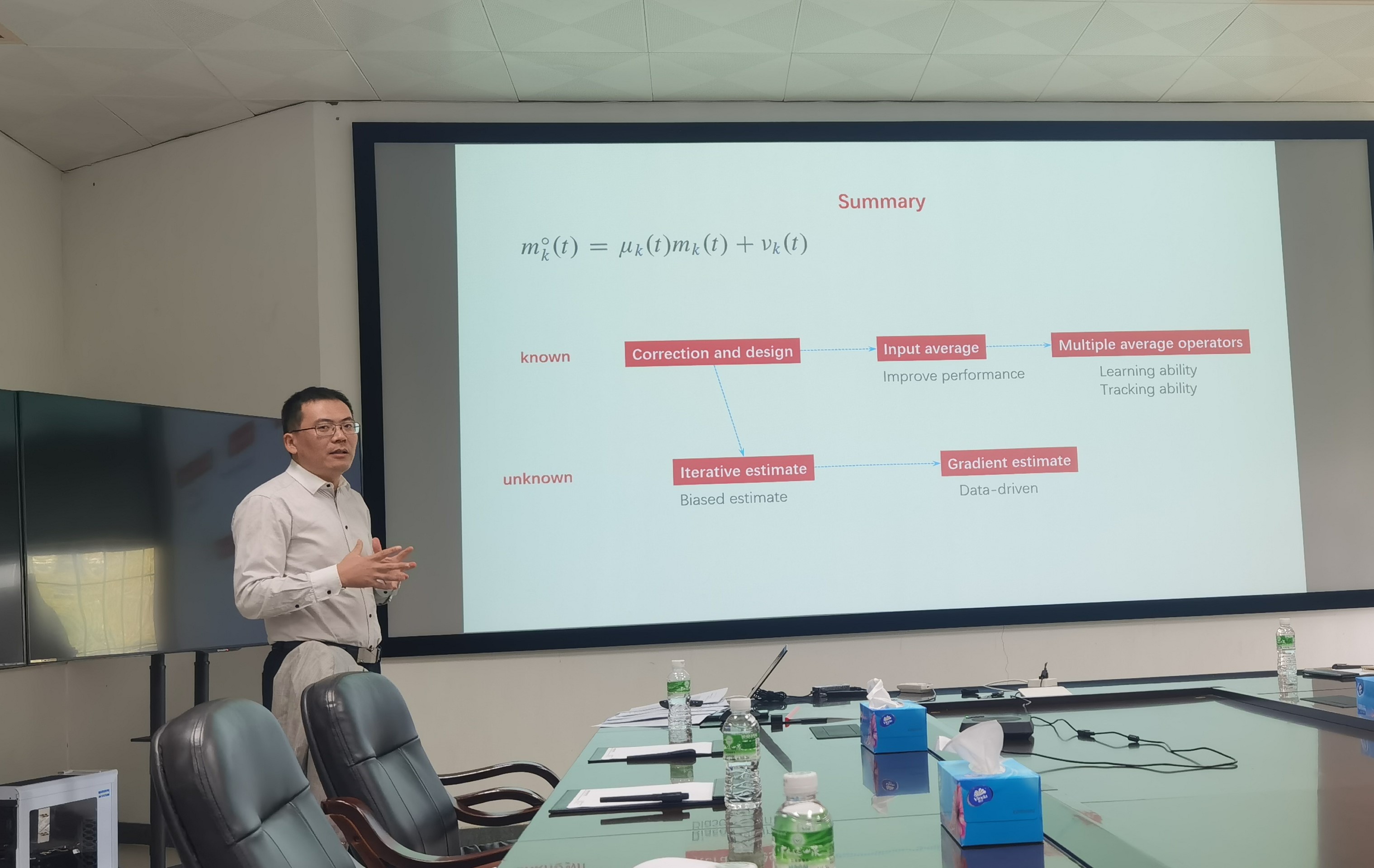
Our
recent focus is learning control with fading channels. A fading channel
indicates the unreliable communication network that the transmitted
signal would suffer multiplicative randomness. Such randomness is
generally modeled by a random variable with its expectation away from
1; thus, the received signal is usually biased in the sense that its
expectation is not the original signal. Consequently, a correction is
necessary for the received signal before the following procedures. The
primary issue in this direction is how to correct the received signals.
 If the statistics information
(especially the mean) of the fading channel is known,
a direct correction can be made by multiplying the mean inverse to the
received signals. The design and analysis are given in [TSMC:
Syst-2021].
We notice that the corrected input is involved with large disturbances,
which may significantly affect the dynamics of the plant. To address
this issue, we proposed an iteration domain moving averaging operator
for the received inputs. The results are elaborated in [TNNLS-2020].
Motivated by the averaging idea, we proceed to investigate how the
averaging techniques affect the learning and tracking abilities of a
conventional learning scheme, where the learning ability is reflected
by the convergence rate and tracking ability is reflected by the final
tracking precision. To this end, we studied three specific averaging
techniques, namely, moving averaging, general average with all
historical information, and forgetting-based average. The results
demonstrate that the forgetting-based average operator-based scheme can
connect the other two schemes by tuning the forgetting factor. The
results are provided in [TAC-2021].
In addition, we have successfully extended the learning control scheme
to a distributed version for multi-agent systems, where each agent is
controlled by the input signal generated using the faded neighborhood
information (FDI). The iterationwise asymptotic consensus tracking is
strictly established for both linear and affine nonlinear multi-agent
systems. The results are provided in [TNNLS-2021c]
If the statistics information
(especially the mean) of the fading channel is known,
a direct correction can be made by multiplying the mean inverse to the
received signals. The design and analysis are given in [TSMC:
Syst-2021].
We notice that the corrected input is involved with large disturbances,
which may significantly affect the dynamics of the plant. To address
this issue, we proposed an iteration domain moving averaging operator
for the received inputs. The results are elaborated in [TNNLS-2020].
Motivated by the averaging idea, we proceed to investigate how the
averaging techniques affect the learning and tracking abilities of a
conventional learning scheme, where the learning ability is reflected
by the convergence rate and tracking ability is reflected by the final
tracking precision. To this end, we studied three specific averaging
techniques, namely, moving averaging, general average with all
historical information, and forgetting-based average. The results
demonstrate that the forgetting-based average operator-based scheme can
connect the other two schemes by tuning the forgetting factor. The
results are provided in [TAC-2021].
In addition, we have successfully extended the learning control scheme
to a distributed version for multi-agent systems, where each agent is
controlled by the input signal generated using the faded neighborhood
information (FDI). The iterationwise asymptotic consensus tracking is
strictly established for both linear and affine nonlinear multi-agent
systems. The results are provided in [TNNLS-2021c]
If the statistics information is
unknown, a promising approach is to estimate the mean of the
fading channel. This idea is conducted in [TNNLS-2021a],
where an iterative estimation mechanism is proposed using a unit pilot
signal in each iteration. This mechanism provides necessary statistical
information such that the biased signals after transmission can be
corrected before being utilized. All the above advances assume that the
system information is available
for the control design. If both
system information and fading statistics are unknown,
a natural idea is to estimate them simulatenously. To this end, we
propose an error transmission mode and an iterative gradient estimation
method. Using the faded tracking error data only, the gradient for
updating input is iteratively estimated by a random difference
technique along the iteration axis. This gradient acts as the updating
term of the control signal. The results are summarized in [TNNLS-2021b].
Furthermore, we
consider the general case that the
fading channels' statistics, i.e., mean and covariance, are
nonrepetitive in the iteration domain.
This nonrepetitive randomness introduces non-stationary contamination
and drifts to the actual signals, yielding essential challenges in
signal processing and learning control. we propose a practical
framework constituted by an unbiased estimator of the mean inverse, a
signal correction mechanism, and learning control schemes. The
convergence and tracking performance are established for both constant
and decreasing step-lengths. If the statistics satisfy asymptotic repetitiveness
in the iteration domain, a consistent estimator applies to the
framework while retaining the framework's asymptotic properties. These
results are demonstrated in [TAC-2022].
All the above publications are regular papers in IEEE Transactions. For
a complete list, please refer to the LazyPack
under the Topic: ILC with fading
channels.
Annual
Reports
Lab Director: Wu Yuzhang Distinguished Professor Dong Shen
Research
Interests: Iterative
learning control, machine learning and its applications, financial
mathematics and fintech, stochastic
approximation algorithms,
multi-agent systems, distributed
and decentralized optimization algorithms.
Contact Information
Office
Address:
Room 207, No. 4
Teaching Building, Renmin University of China, No. 59
Zhongguancun Street, Haidian District, Beijing 100872
Mailing
Address:
School of
Mathematics, Renmin University of
China,
No. 59 Zhongguancun Street, Beijing 100872, P.R. China
Tel: 86-10-82507078
E-mail: dshen [at] ieee [dot] org
ORCID: 0000-0003-1063-1351
Education
2005.09-2010.07,
Ph.D. in Mathematics, Academy of Mathematics and Systems Sciences,
Chinese Academy of Sciences
2001.09-2005.07, B.S. in Mathematics, School of Mathematics, Shandong
University
Professional
Positions
2019.12-present,
Professor, School of Mathematics, Renmin University of China
2020.10-present, Head, Department of Information and Computation
Sciences, School of Mathematics, RUC
2019.12-present, Principal Investigator, Eng. Res. Center of Finance
Computation and Digital Engineering, Ministry of Education
2020.01-present, Director, Distributed Artificial Intelligence Lab.,
ERC-FCDE, MoE
2019.07-2019.08, Visiting Scholar, RMIT University, Australia
2018.01-2019.12,
Professor, Beijing University of Chemical Technology
2012.06-2017.12,
Associate Professor, Beijing University of Chemical Technology
2016.02-2017.02, Visiting Scholar, National University of Singapore,
Singapore
2010.07-2012.05, Postdoctoral Fellow, Institute of Automation, CAS

Short Biography
Dong
SHEN (M'10-SM'17) received the B.S. degree in mathematics from
Shandong University,
Jinan, China, in 2005. He received the Ph.D. degree in mathematics from
the
Academy of
Mathematics and Systems Science,
Chinese Academy of Sciences (CAS), Beijing, China,
in 2010 (supervised by Prof.
Han-Fu
Chen, IEEE/IFAC Fellow).
From 2010 to 2012, he was a Post-Doctoral Fellow with the
Institute of Automation,
CAS (advised by Prof.
Fei-Yue Wang, IEEE/IFAC Fellow). From 2016
to 2017, he was a visiting scholar at National University of Singapore
(with Prof.
Jian-Xin Xu, IEEE Fellow). From 2019 July to
August, he was a visiting scholar at RMIT University (with Prof.
Xinghuo Yu, IEEE Fellow). From 2012 to 2019, he
has been
with
College of
Information Science and Technology,
Beijing University of
Chemical Technology, Beijing, China. Now, he is a Full
Professor with the
School
of Mathematics,
Renmin
University of China, Beijing, China.
His current research interests include iterative learning control,
stochastic control and optimization, machine learning and its
applications. He has published more than
180
refereed journal and conference papers. He is the (co-)author of
Iterative Learning Control Over Random Fading Channels (CRC Press,
2024),
Iterative Learning Control
for Systems with Iteration-Varying Trial
Lengths (Springer, 2019),
Iterative
Learning Control with Passive Incomplete Information (Springer,
2018),
Iterative Learning
Control for Multi-Agent Systems Coordination (Wiley, 2017), and
Stochastic Iterative Learning
Control (Science Press, 2016, in Chinese). Dr. Shen received Henan Provincial Natural Science Award in 2022, Shandong Provincial
Natural Science Award in 2021,
IEEE
CSS Beijing Chapter Young Author Prize in 2014, and Wentsun Wu
Artificial Intelligence Science and Technology Progress Award in 2012.
He is on the Editorial Board of International Journal of Robust and
Nonlinear Control, IEEE
Access,
and IET Cyber-Systems and Robotics.

Photos
2022
At Le Méridien Emei Mountain
Resort, DDCLS2022, with Prof. Hao Jiang, Prof. Na Dong, and Prof.
Fuyong Wang
2021
At DDCLS2021, Suzhou, presenting the
invited talk Another pic
At Renmin University of China,
with my students Mr. Yanze Liu, Mr. Kun Zeng, Mr. Ganggui Qu, and Ms
Niu Huo
2020
At Renmin University of China,
with school leaders and Department of Information and Computation
Sciences
At Renmin University of
China, speech as the department head
At YAC2020,with Prof. Bo Zhao
presenting my certificate
At Sun Yat-sen University, a talk for
Prof Xiaodong Li's Team
2019
At Guizhou
University, with Prof. Xisheng Dai and Prof. Deyuan Meng, in front of
the library
At Guizhou University, with Prof.
JinRong and his team, Prof. Deyuan Meng, Prof. Xisheng Dai
At Nankai
University, with Prof. Yuanhua Ni, Prof. Wenxiao Zhao, and Prof.
Zengqiang
Chen (from left)
At Shandong
University, with Prof. Yan Li and his students
At Beihang
University, with Prof Jinhu Lv, Prof. Xinghuo Yu, Prof. Hong Li, Prof.
Nian Liu (from left)
2018
At Qingdao University
of Science and Technology
At Xidian Univerisyt
with Prof. Junmin Li, Prof. Xiao'e Ruan, and Prof. Zhengrong Xiang
At Beihang University with
Prof. Kevin L. Moore and Prof. Deyuan Meng
At a seaside
in Tsingtao with Prof. Deqing Huang (during the 2nd ILC-TableParty 0724)
At DDCLS18 in
Enshi with my master students: Mr. Chao Zhang and Mr. Chen Liu
At Whampoa Military
Academy, Guangzhou
2017
IEEE
Senior Member Certificate
With Koala in
Currumbin Widelife Sanctuary, Gold Coast, Australia
IEEE
Senior Membership Card
At Great Wild
Goose Pagoda in
Xi'an
With Miss Yun Xu
celebrating her
graduation
At DDCLS17
in Chongqing with
my master students: Miss Chun Zeng and Mr. Chao Zhang
2016
on Alumni Day at NUS
2014
Mt. Tai-A Mt. Tai-B
2005
Bachelor
Transcript
Receiving
President Scholarship from President Tao ZHAN of Shandong University
Letter of
Admission from Graduate University of Chinese Academy of Sciences
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}