Summary:
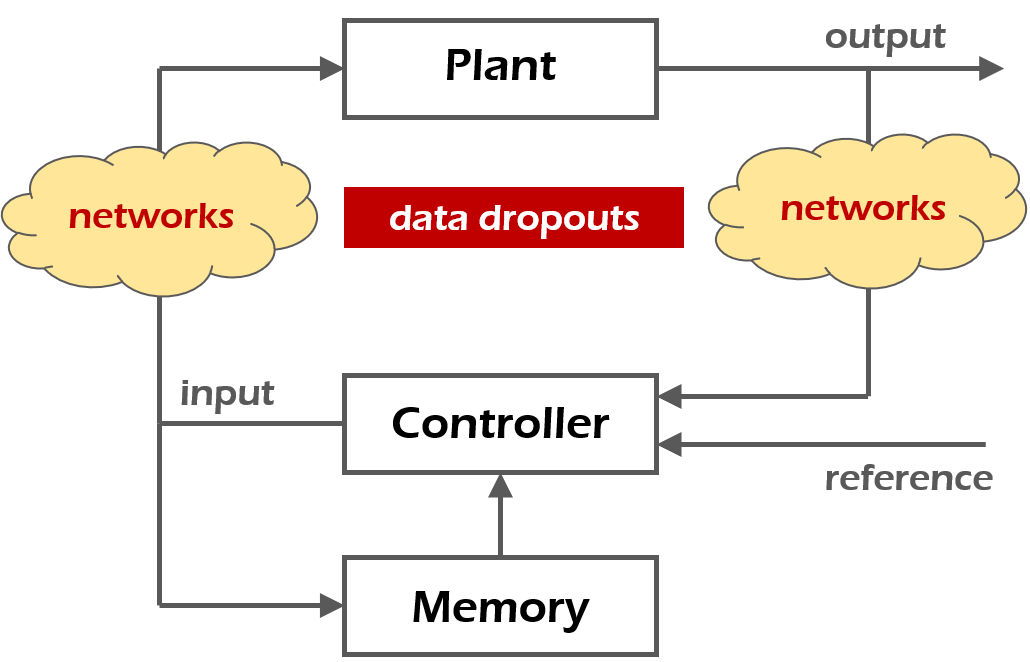
In this topic, we have studied various data dropout models (e.g.,
stochastic sequence model, Bernoulli random variable model, and Markov
chain model), controlled plants (e.g., linear model and nonlinear
model), dropout positions (e.g., one-sided and two-sided dropouts),
update laws (e.g., intermittent update scheme and successive update
scheme), and convergence senses (e.g., expectation sense, mean square
sense, and almost sure sense). Representive publications: Dong Shen. Iterative
Learning Control with Incomplete Information: A Survey. IEEE/CAA
Journal of Automatica Sinica, vol. 5, no. 5, pp. 885-901, 2018. Dong
Shen. Data-Driven Learning Control for Stochastic Nonlinear
Systems: Multiple Communication Constraints and Limited Storage. IEEE
Transactions on Neural Networks and Learning Systems, vol. 29, no. 6,
pp. 2429-2440, 2018. Dong
Shen, Jian-Xin Xu. A Novel Markov Chain Based ILC Analysis for Linear
Stochastic Systems Under General Data Dropouts Environments. IEEE
Transactions on Automatic Control, vol. 62, no. 11, pp. 5850-5857, 2017. Dong
Shen, Chao Zhang, Yun Xu. Two Updating Schemes of Iterative Learning
Control for Networked Control Systems with Random Data Dropouts.
Information Sciences, vol. 381, pp. 352-370, 2017. Dong
Shen, Youqing Wang. Iterative Learning Control for Networked Stochastic
Systems with Random Packet Losses. International Journal of Control,
vol. 88, no. 5, pp. 959-968, 2015.
Topic
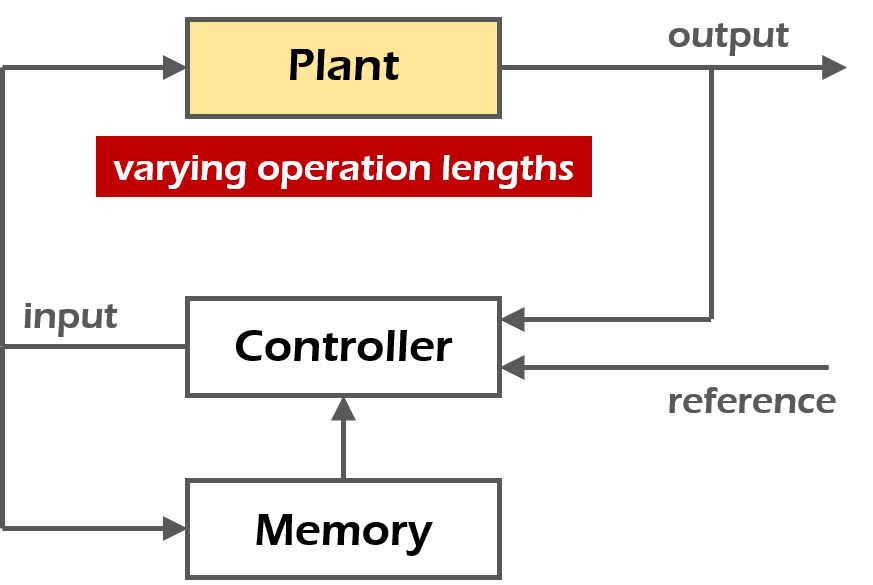
2: ILC with Randomly Varying Lengths
Summary:
In this topic, we
focus on the problem that the actual operation length varies in
different iterations randomly. We have formulated the random iteration
length by a random variable and established the strong convergence
results using the probability theory. We have considered both
discrete-time and continuous-time systems. Representive publications:
Dong Shen, Xuefang Li. A Survey on Iterative Learning Control with
Randomly Varying Trial Lengths: Model, Synthesis, and Convergence
Analysis. Annual Reviews in Control, vol. 48, pp. 89-102, 2019. Dong
Shen, Samer S. Saab. Noisy Output Based Direct Learning Tracking
Control with Markov Nonuniform Trial Lengths Using Adaptive Gains. IEEE
Transactions on Automatic Control, vol. 67, no. 8, pp. 4123-4130, 2022.
Dong Shen,Jian-Xin Xu. Robust Learning Control for Nonlinear Systems
with Nonparametric Uncertainties and Non-uniform Trial Lengths.
International Journal of Robust and Nonlinear Control, vol. 29, no. 5,
pp. 1302-1324, 2019. Dong Shen, Jian-Xin Xu.
Adaptive Learning Control for Nonlinear Systems
with Randomly Varying Iteration Lengths. IEEE Transactions on Neural
Networks and Learning Systems, vol. 30, no. 4, pp. 1119-1132, 2019. Dong
Shen, Wei Zhang, Youqing Wang, Chiang-Ju Chien. On Almost Sure and Mean
Square Convergence of P-type ILC Under Randomly Varying Iteration
Lengths. Automatica, vol. 63, no. 1, pp. 359-365, 2016. Xuefang
Li, Dong Shen. Two Novel Iterative Learning Control Schemes for Systems
with Randomly Varying Trial Lengths. Systems & Control Letters,
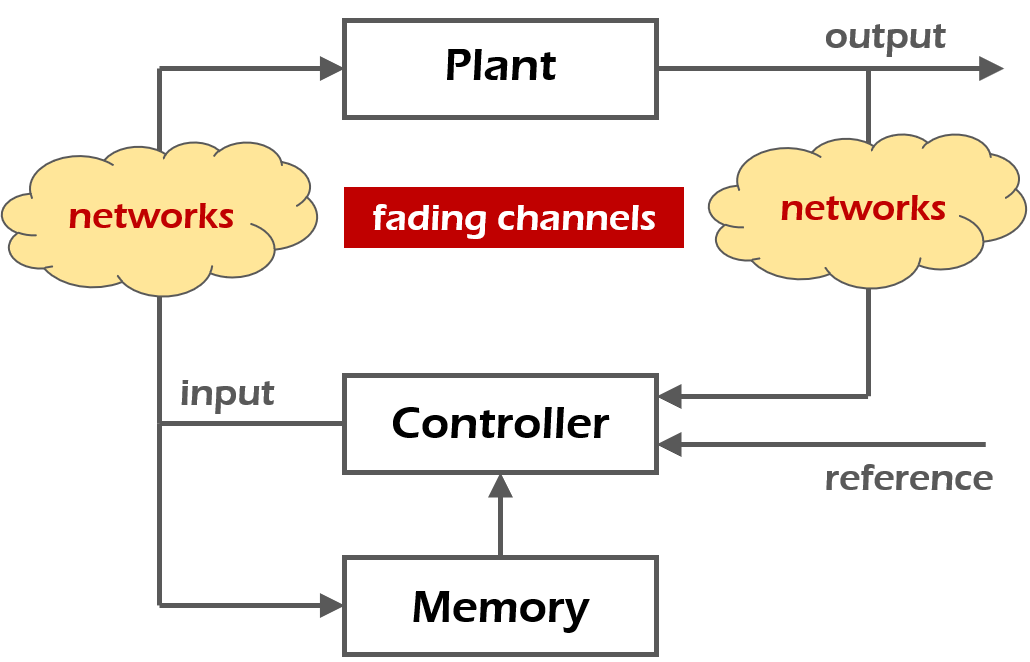
vol. 107, pp. 9-16, 2017. Topic 3: ILC over Fading Channels
Summary:
In this topic, we
have studied iterative learning control design and analysis topics in
the presence of fading channels. Here, by fading we imply the
multiplicable randomness associated with the signals while transmitting
over wireless networks. Representive publications: Dong
Shen. Practical Learning-Tracking Framework Under Unknown Nonrepetitive
Channel Randomness. IEEE Transactions on Automatic Control, early
access. Shunhao
Huang, Dong Shen, JinRong Wang. Point-to-Point Learning Tracking
Control via Fading Communication Using Reference Update Strategy. IEEE
Transactions on Cybernetics, early access. Ganggui
Qu, Dong Shen, Xinghuo Yu. Batch-Based Learning Consensus of
Multi-Agent Systems With Faded Neighborhood Information. IEEE
Transactions on Neural Networks and Learning Systems, early access. Dong
Shen, Xinghuo Yu. Learning Control over Unknown Fading Channels Based
on Iterative Estimation. IEEE Transactions on Neural Networks and
Learning Systems, early access.
Dong Shen, Ganggui Qu, Xinghuo Yu. Averaging Techniques for Balancing
Learning and Tracking Abilities Over Fading Channels. IEEE Transactions
on Automatic Control, vol. 66, no. 6, pp. 2636-2651, 2021. Dong
Shen, Xinghuo Yu. Learning Tracking Control Over Unknown Fading
Channels Without System Information. IEEE Transactions on Neural
Networks and Learning Systems, vol. 32, no. 6, pp. 2721-2732, 2021. Dong
Shen, Ganggui Qu. Performance Enhancement of Learning Tracking Systems
Over Fading Channels with Multiplicative and Additive Randomness. IEEE
Transactions on Neural Networks and Learning Systems, vol. 31, no. 4,
pp. 1196-1210, 2020.
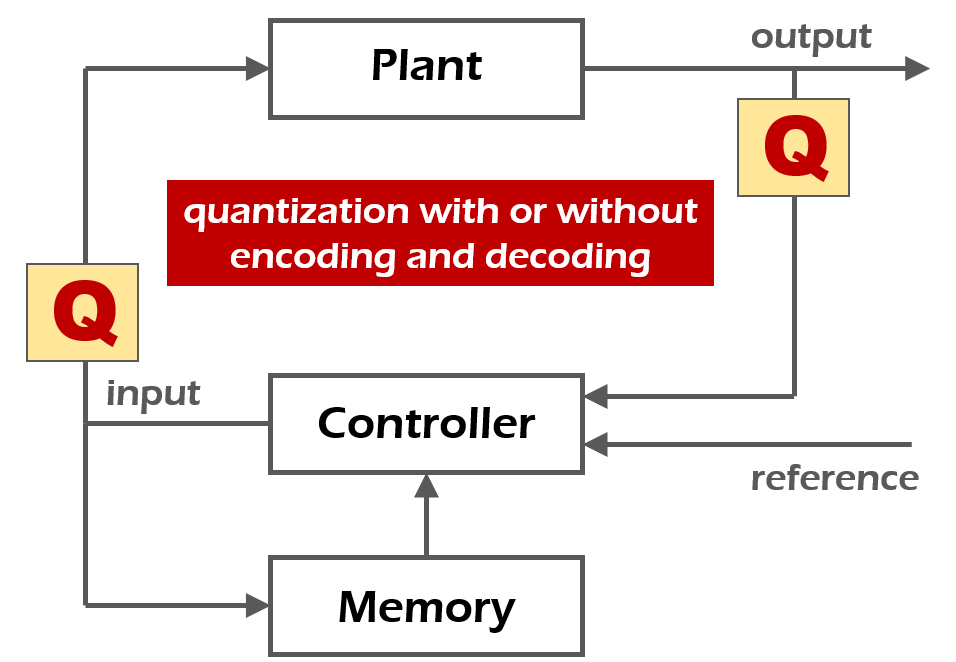
Topic 4: ILC with Quantization
Summary:
In this topic, we
consider the problem that the signal is first quantized and then
transimitted, so that the transmission burden can be effectively
reduced for practical applications. In particular, we have proposed an
error-quantization method to ensure zero-error tracking performance for
static logarithm quantizer. We have also introduced an encoding and
decoding mechanism for the simple uniform quantizer with a strict
zero-error tracking performance analysis. Representive publications:
Dong Shen, Niu Huo, Samer S. Saab. A Probabilistically Quantized
Learning Control Framework for Networked Linear Systems. IEEE
Transactions on Neural Networks and Learning Systems. Dong
Shen, Chao Zhang. Zero-Error Tracking Control under Unified Quantized
Iterative Learning Framework via Encoding-Decoding Method. IEEE
Transactions on Cybernetics, vol. 52, no. 4, pp. 1979-1991, 2022. Niu
Huo, Dong Shen. Encoding-decoding Mechanism-based Finite-level
Quantized Iterative Learning Control with Random Data Dropouts. IEEE
Transactions on Automation Science and Engineering, vol. 17, no. 3, pp.
1343-1360, 2020. Dong
Shen, Yun Xu. Iterative Learning Control for Discrete-time Stochastic
Systems with Quantized Information. IEEE/CAA Journal of Automatica
Sinica, vol. 3, no. 1, pp. 59-67, 2016.
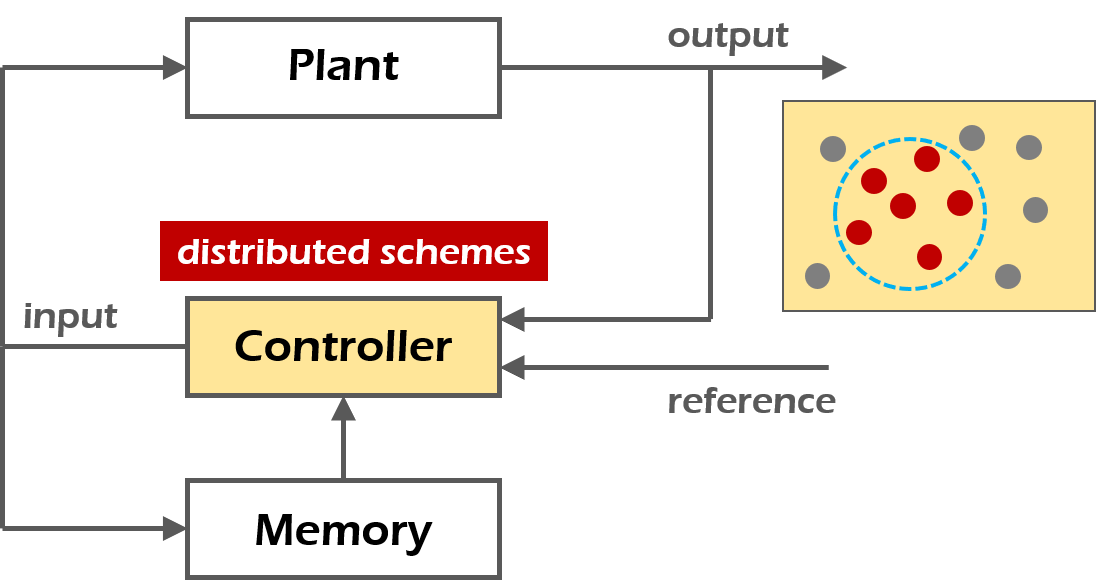
Topic 5: ILC for Multi-agent Systems
Summary:
In this topic, we
have studied the learning consensus problem of multi-agent systems with
output constraints. A general-type barrier function is introduced to
solve the state/output constraints problem. Representive publications:
Dong Shen, Jian-Xin Xu. Distributed Learning Consensus for Heterogenous
High-Order Nonlinear Multi-Agent Systems with Output Constraints.
Automatica, vol. 97, pp. 64-72, 2018.
Dong Shen, Chao Zhang, Jian-Xin Xu. Distributed Neural Networks Based
Learning Consensus Control for Heterogeneous Nonlinear Multi-Agent
Systems. International Journal of Robust and Nonlinear Control, vol.
29, no. 13, pp. 4328-4347, 2019.
Chen Liu, Dong Shen, JinRong Wang. Iterative Learning Control of
Multi-Agent Systems under Communication Noises and Measurement Range
Limitations. International Journal of Systems Science, vol. 50, no. 7,
pp. 1465-1482, 2019. Dong
Shen, Jian-Xin Xu. Distributed Adaptive Iterative Learning Control for
Nonlinear Multi-Agent Systems with State Constraints. International
Journal of Adaptive Control and Signal Processing, vol. 31, no. 12, pp.
1779-1807, 2017. Topic
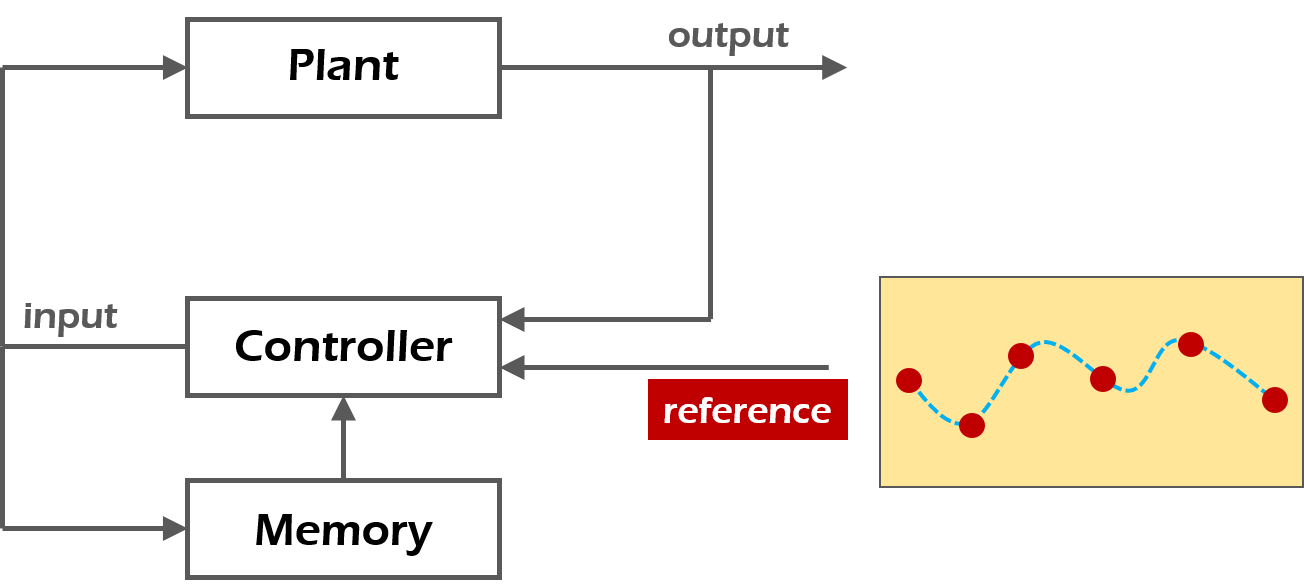
6: Point-to-Point ILC and Terminal ILC
Summary:
In this topic, we
consider the problem that the desired reference is a set of individual
points/positions rather than a compelete trajectory. In this case, the
input signal can be continuous, step-functions, and time-invariant. For
point-to-point ILC problem, we have proposed an equivalent formulation
of the problem and estibalished a stochastic approximation based
framework. For terminal ILC problem, we have proposed an adaptive
solution using neural networks. Representive publications:
Dong Shen, Jian Han, Youqing Wang. Stochastic Point-to-Point Iterative
Learning Tracking Without Prior Information on System Matrices. IEEE
Transactions on Automation Science and Engineering, vol. 14, no. 1, pp.
376-382, 2017. Yun
Xu, Dong Shen, Xiao-Dong Zhang. Stochastic Point-to-Point Iterative
Learning Control Based on Stochastic Approximation. Asian Journal of
Control, vol. 19, no. 5, pp. 1748-1755, 2017. Jian
Han, Dong Shen, Chiang-Ju Chien. Terminal Iterative Learning Control
for Discrete-Time Nonlinear Systems Based on Neural Networks. Journal
of the Franklin Institute, vol. 355, no. 8, pp. 3641-3658, 2018. Topic
7: ILC for Stochastic Nonlinear Systems
Summary:
In this topic, we
have studied various stochastic nonlinear systems, such as affine
nonlinear systems with hard-nonlinearities (deadzone, saturation, and
preload), Hammerstein-Wiener Systems, and large-scale systems. The
stochastic approximation based framework for solving these systems are
established. Representive publications:
Dong Shen, Han-Fu Chen. ILC for Large Scale Nonlinear Systems with
Observation Noise. Automatica, vol. 48, no. 3, pp. 577-582, 2012. Dong
Shen, Yutao Mu, Gang Xiong. Iterative Learning Control for Nonlinear
Systems with Dead-zone Input and Time-delay in Presence of Measurement
Noise. IET Control Theory and Applications, vol. 5, no. 12, pp.
1418-1425, 2011. Dong
Shen, Chao Zhang. Learning Control for Discrete-Time Nonlinear Systems
With Sensor Saturation and Measurement Noise. International Journal of
Systems Sciences, vol. 48, no. 13, pp. 2764-2778, 2017. Dong
Shen, Han-Fu Chen. A Kiefer-Wolfowitz Algorithm Based Iterative
Learning Control for Hammerstein-Wiener Systems. Asian Journal of
Control, vol. 14, no. 4, pp. 1070-1083, 2012.
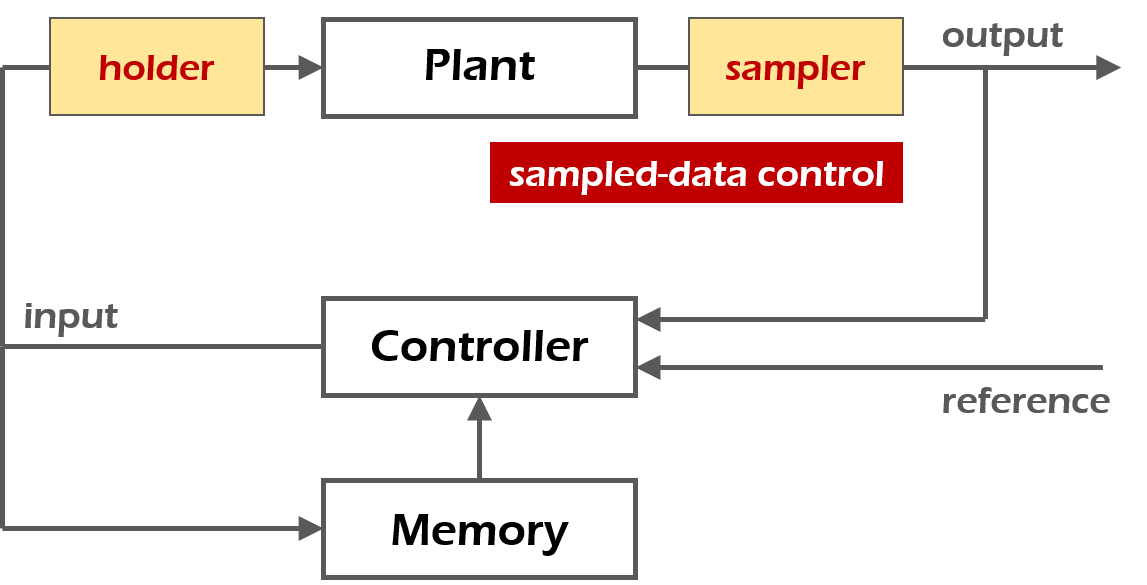
Topic 8: ILC with Sampled Data
Summary:
In this topic, we
have established the upper bound estimation of interval tracking errors
for sampled-data based ILC, which is the first time to give a sight
beyond the at-sample performance in the existing literature. Representive publications:
Yun Xu, Dong Shen, Youqing Wang. On Interval Tracking Performance
Evaluation and Practical Varying Sampling ILC. International Journal of
Systems Science, vol. 48, no. 8, pp. 1624-1634, 2017.
Projects
Z210002, Mathematical Theory of Distributed Artificial Intelligence and Its Applications in Financial Risk Perception, Beijing Natural Science Foundation, 2021.8-2025.8
62173333, Framework and Techniques of Iterative Learning Control Based on System Cognition, National Natural Science Foundation of China, 2022.1-2025.12.
61673045, Robustness of
Iterative Learning Control
under Incomplete Data and Control System Design, National
Natural Science Foundation of China, 2017.01-2020.12
4152040, Design and
Analysis of Iterative Learning
Control under Random Packet Losses, Beijing Natural
Science Foundation, 2015.01-2017.12
61304085, Design and
Analysis of
Iterative Learning Control Algorithms of Stochastic Systems for
Unusual Tracking References, National Natural Science Foundation
of China, 2014.01-2016.12
G-JG-XJ201404,
Mathematics
Competency Cultivation for Graduate Student in Automation Discipline,
Beijing University of Chemical Technology, 2015.01-2016.12
Advanced
Iterative Learning
Control, the High-Level Talents Launching Funds, Beijing
University of Chemical Technology, 2012.07-2015.06
ZY1318, Stochastic
Iterative
Learning Control for Iteration-Varying Reference Trajectories,
Beijing University of Chemical Technology, 2013.01-2014.12